

“iCub“, il robot-bambino sviluppato dall’Istituto Italiano di Tecnologia (IIT) di Genova, ha compiuto un ulteriore passo in avanti: è stato sviluppato un software che permette al robot di acquisire una sorta di consapevolezza del proprio corpo. Dopo una fase di apprendimento, iCub è infatti in grado di riconoscere le varie zone della propria superficie, grazie a delle stimolazioni.
Il cervello del piccolo robot produce una rappresentazione dell’anatomia del proprio corpo, creando una sorta di mappa anatomica, con l’aiuto di sensori, i quali sono dislocati sotto la pelle artificiale, che riveste iCub. Infatti, il piccolo robot italiano è l’unica macchina al mondo ad avere l’intera superficie del corpo ricoperta da una pelle sensibile, grazie a qualcosa come 2.000 sensori.
La realizzazione di macchine sempre più in grado di percepire gli stimoli dell’ambiente, per potersi orientare meglio nella realtà e prendere decisioni migliori, è la nuova sfida per i ricercatori impiegati nel settore della robotica. iCub è ora in grado di imparare da solo e migliorare il proprio rapporto con il mondo che lo circonda. Rendere gli umanoidi consapevoli è un passo fondamentale per l’ingresso dei robot nelle nostre case, e questo nuovo sviluppo permetterà una interazione uomo-macchina più sicura.
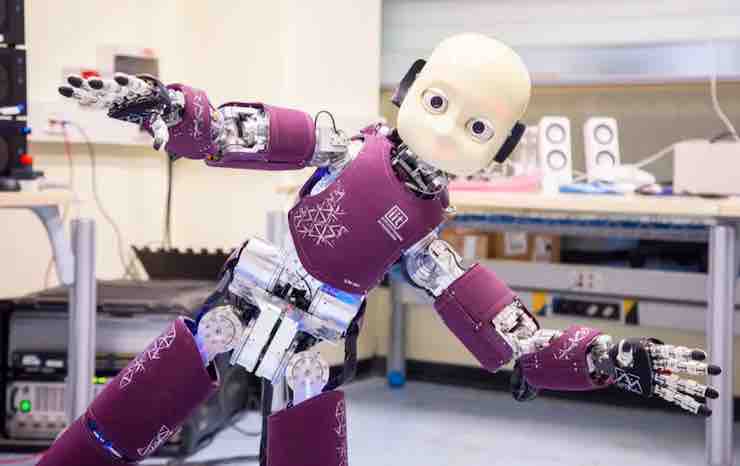
iCub è un cucciolo di robot, alto 1.04 metri e con un peso di circa 25 kg. È infatti l’umanoide più completo sulla faccia della Terra: ha mani di metallo, muscoli ad azionamento elettrico, due telecamere per occhi, due microfoni per orecchie, uno speaker al posto della bocca, la possibilità di comunicare con le espressioni del volto e perfino una pelle artificiale. Inoltre, riesce a parlare, vedere, riconoscere e afferrare gli oggetti. E, soprattutto, apprendere dagli errori. La prima volta che prova ad afferrare qualcosa può sbagliare, ma successivamente si corregge e impara anche a dosare la forza in modo opportuno.
iCub ha però un cervello in silicio, che per funzionare non può contare su neuroni come i nostri.
La sua “mente“, dunque, deve essere costruita in maniera diversa. Innanzitutto è suddivisa in moduli, che si occupano di compiti specifici: c’è un modulo per riconoscere gli oggetti, uno per estrarre l’informazione tattile e così via.
Le varie componenti sensoriali sono poi integrate tra loro, in modo da ricostruire un’esperienza e archiviarla in memoria per riutilizzarla in futuro:
- ORECCHIE: sono costituite da microfoni standard. All’interno c’è anche un sistema di giroscopi che, analogamente all’apparato vestibolare negli esseri umani, garantisce l’equilibrio;
- CERVELLO: il cervello è costituito da due parti: una che si trova all’interno, l’altra all’esterno del robot. All’interno, nella testa, ci sono una ventina di processori che controllano i movimenti di iCub, più una ventina che raccolgono i dati sensoriali che arrivano dalla pelle. La parte esterna è costituita da una trentina di potenti processori, connessi a internet, che elaborano le immagini riprese dalle telecamere, le integrano agli altri dati sensoriali elaborando i sistemi di controllo, cioè determinando il “comportamento” che avrà il robot;
- OCCHI: sono costituiti da due telecamere che consentono una visione stereoscopica. Su alcuni modelli si stanno sperimentando telecamere più avanzate di tipo “neuromorfo“, che imitano il funzionamento del nervo ottico umano: consentono di vedere le variazioni di luce in modo più accurato e di distinguere meglio gli oggetti in movimento;
- MANO: è dotata di 22 snodi, quasi quanto una mano vera. Pollice, indice e medio si possono muovere in modo indipendente, consentendo una presa di precisione, mentre anulare e mignolo si muovono insieme. Un progetto europeo avviato a gennaio ha cominciato a studiare un processo chiamato hand manipulation, che consiste nel cambiare azione con una stessa mano. Per esempio afferrare una penna, aggiustare la presa e cominciare a scrivere: una sequenza di azioni molto difficili da eseguire per un robot;
- DITO: ogni dito è dotato di 3 falangi, anche se solo le prime 3 dita possono muoverle in modo indipendente (in realtà, il pollice ha tre movimenti indipendenti, mentre l’indice e il medio ne hanno due). Ogni movimento è infatti generato da un motore;
- MUSCOLI: sono costituiti da motori elettrici ad alte prestazioni, compatti ed efficienti, normalmente utilizzati nel settore aerospaziale. Grazie alla sua muscolatura, il robot è teoricamente in grado di alzare 5 kg con un solo braccio, anche se non è mai stato messo alla prova su questo aspetto;
- OSSA: la struttura portante è in una lega di alluminio detta “ergal“. Alcune componenti delle gambe e alcuni giunti della spalla (sottoposti a maggiori sollecitazioni meccaniche) sono realizzate in acciaio;
- PELLE: la pelle è il fiore all’occhiello di iCub, uno dei pochi robot al mondo dotato di quest’organo sensoriale. La pelle è costituita da 5 mila sensori di pressione distribuite su tutto il corpo e soprattutto sulle mani. Secondo alcuni esperimenti preliminari, questi sensori consentirebbero al robot anche di percepire in modo indiretto il calore e la struttura delle superfici (lisce, rugose, ecc.) con cui vengono a contatto;
- GAMBE: oltre a ossa e muscoli meccanici, le gambe hanno anche alcuni giunti dotati di molle, che funzionano da ammortizzatori e consentono a iCub di attutire gli impatti in caso di brusche interazioni con l’ambiente. Camminare per il robot è una funzione complessa, che i ricercatori hanno cominciato a studiare solo di recente in open source.
Articolo realizzato da Fabio Meneghella